

Short Explanation
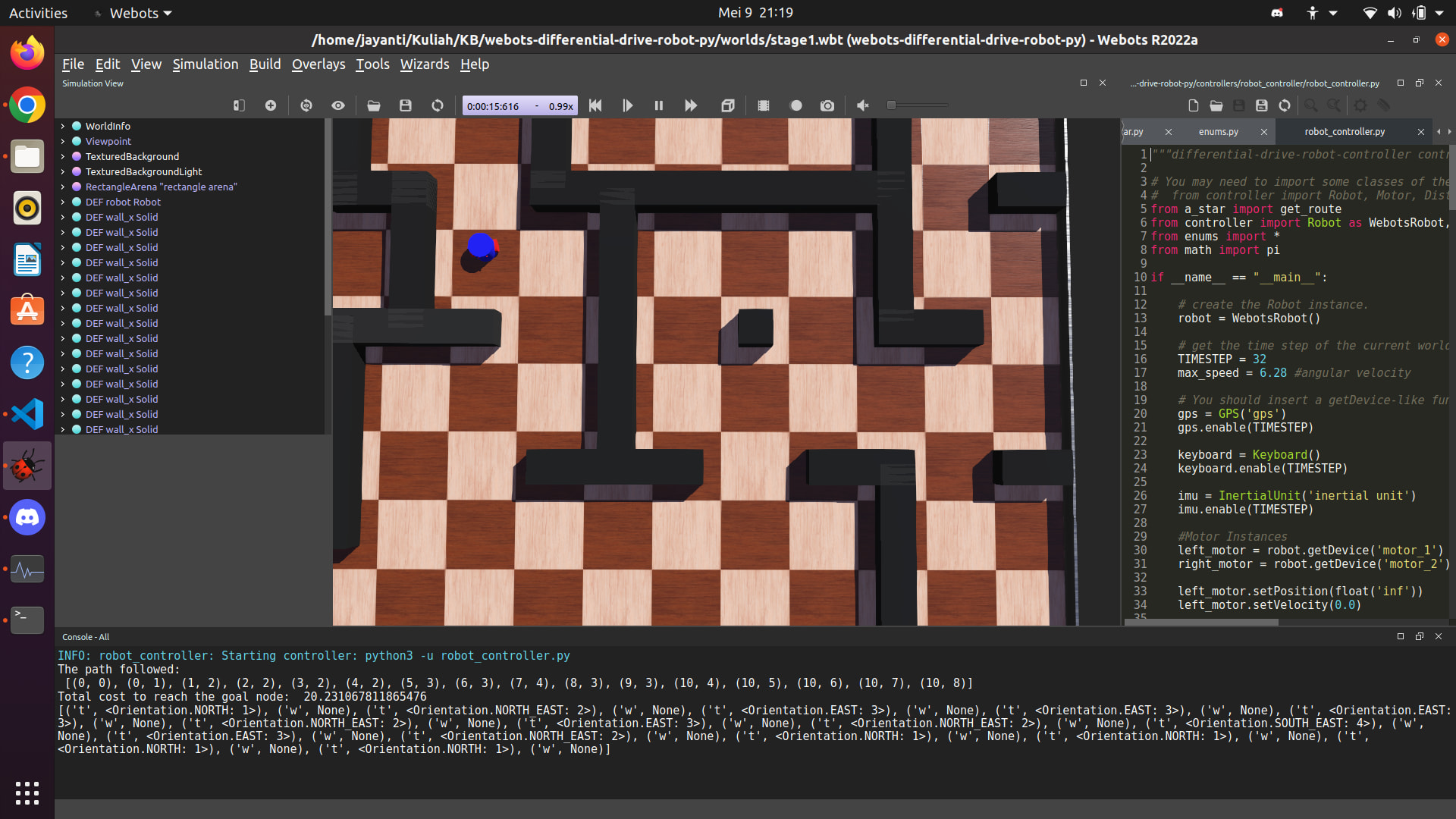
Demonstrate how to implement the A* path planning algorithm in a simulated environment using Webots. This involves programming a differential drive robot to navigate safely through a predefined map. The project provides all necessary scripts and environment settings to run the simulation, which can help us in understanding how autonomous vehicles navigate and avoid obstacles in real-time scenarios.
Tech Stack Used
Stage 1

Stage 2

Stage 3
